ЧАСТЬ II
ЧАСТЬ II
§ 10. Разъяснение загадок
В предыдущих разделах основной задачей автора было обеспечение доступности изложения. Не использовались никакие математические средства, кроме знакомых каждому по средней школе простейших алгебраических уравнений. При этом, естественно, не удавалось разъяснить некоторые тонкие вопросы: почему, например, аварии, причиной которых является встреча с «особым» объектом, обладают особенными чертами, описанными в параграфе 8 и позволяющими правильно определить причину аварии. Остались, возможно, не до конца понятными (а может быть и загадочными) некоторые другие вопросы.
В настоящей второй части мы разъясним эти загадки, но для понимания их от читателя потребуется — в отличие от первой части — знание математики в объеме технического вуза и, в частности, знакомство с простейшими линейными дифференциальными уравнениями с постоянными коэффициентами и методами расчета устойчивости их решений.
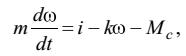
Рассмотрим электропривод постоянного тока, математической моделью которого является простое дифференциальное уравнение первого порядка:
 (9)
(9)
где ? — частота вращения, і — ток якоря, который в регулируемых приводах является управляющим воздействием, Мс — момент сопротивления исполнительного механизма, m — механическая постоянная времени электропривода, численно равная времени его разгона от нулевой частоты вращения до номинальной при номинальном токе якоря и нулевом моменте сопротивления.
Обозначим через ?1, х2 и х3 отклонения частоты вращения, тока якоря и момента сопротивления Мc от их номинальных значений, а коэффициент к примем равным к = 2. Получим уравнение электропривода «в отклонениях»:
тх1 = -2х1 +х2 + х3 (10)
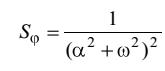
Если момент сопротивления используемого механизма является стационарным случайным процессом со спектром
 (11)
(11)
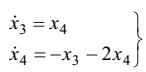
то для простейшего случая ? = 1 переменная х3 и ее производная х4 будут удовлетворять уравнениям:
 (12)
(12)
Система трех дифференциальных уравнений (10)—(12) является математической моделью электропривода как объекта управления. Колебания частоты вращения можно уменьшить за счет регулятора с обратной связью. Пусть в этом регуляторе управляющее воздействие х2 формируется в функции от остальных переменных по закону:
х2 = -X1 - 2х3 —х4 (13)
Тогда система четырех уравнений (10), (12), (13) является математической моделью замкнутой системы управления. Уравнения (10)—(12) типичны для многих электроприводов, а формируя управляющее воздействие в виде (13) мы следуем известным рекомендациям А. М. Летова. Для удобства дальнейших расчетов мы округлили параметры электропривода до целых чисел, но в целом система уравнений (10), (12), (13) отражает вполне типичную практическую ситуацию.
Исследуем устойчивость этой системы и влияние на устойчивость изменений параметра m -механической постоянной времени электропривода. Если текущее время t, входящее в уравнения (10), (12), (13), измерять в долях механической постоянной времени, то номинальное значение параметра m будет равно единице, но в ходе эксплуатации электропривода возможен, разумеется «дрейф» этого параметра и отклонение его от значения m = 1.
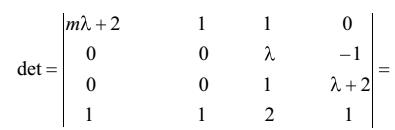
Устойчивость замкнутой системы зависит от корней характеристического полинома (т. е. от «собственных значений» системы), а характеристический полином системы (10), (12), (13) равен легко вычисляемому определителю:
 (14)
(14)
Мы убеждаемся, что характеристический полином замкнутой системы имеет три корня (три «собственных значения»):
(один из корней — кратный) и эти корни отрицательны для всех т в диапазоне

Таким образом, замкнутая система устойчива и сохраняет устойчивость не только при малых, но и при больших отклонениях параметра т от номинального значения т = 1.
Решения системы уравнений (10), (12), (13) имеют вид
 (15)
(15)
где C1, C2, C3 — постоянные интегрирования. Для х2, х3, х4 формулы аналогичны. Мы убеждаемся, что отклонение х быстро затухает с течением времени. Система устойчива для любых т> 0 .
Однако момент сопротивления х3 и особенно его производную х4 очень трудно непосредственно измерить и ввести в канал обратной связи. Поэтому целесообразно исключить из уравнения объекта управления и регулятора переменные х и х путем эквивалентных преобразований. Проделав их, придем к уравнениям (где

является символом оператора дифференцирования):
[mD3 + (2 + 2 m)D2 + (4 + m)D + 2]x1 = (D +1)2 x2 (16)
[mD2 + (2 + 2m)D + 5]x1 = (D + 1)x2 (17)
Уравнение (16) является уравнением объекта управления, уравнение (17) — уравнением регулятора, который на этот раз для формирования управляющего воздействия х2 использует легко доступную для непосредственного измерения переменную х1.
Для исследования устойчивости системы (16)—(17) достаточно найти корни ее характеристического полинома.
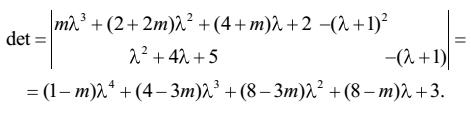
И вот здесь исследователей подстерегала трудность, которая надолго задержала правильный ответ о причинах техногенных катастроф, связанных с «аналитически сконструированными» регуляторами, и укоротила жизнь А. М. Летова: если вычислять характеристический полином системы (16)—(17) по общим математическим правилам как определитель:
 (18)
(18)
то он, как легко проверить, будет равен определителю (14) и мы снова должны будем сделать вывод о том, что замкнутая система устойчива и сохраняет устойчивость при «дрейфе» параметра m .
Однако этот вывод будет ошибочен! Дело в том, что объект управления (электропривод) и регулятор — это разные (хотя и расположенные рядом) устройства, поэтому «дрейф» их параметров может идти независимо друг от друга, образуя самые причудливые комбинации. Рассмотрим простейший (но возможный) случай: параметры регулятора остались равными номинальным значениям (соответствующим т — 1), а в объекте управления механическая постоянная времени немного изменилась. Для анализа устойчивости этого случая надо вычислить определитель:
 (19)
(19)
Пусть m = 1 + ?, где ? - малое число и можно пренебречь членами с ?2, ?3 и др. Тогда сразу видно, что при ? > 0 замкнутая система неустойчива, в решении системы, кроме членов, отраженных формулой (15), появляется очень быстро растущий четвертый член вида
 (20)
(20)
а при ? < 0 устойчивость сохраняется. Исключение переменных х и х из уравнения (10), (12), (13) при правильном учете реальных связей между «дрейфом» параметров в технической системе является примером эквивалентного преобразования, изменяющего свойство сохранения устойчивости при дрейфе параметров.
Формула (19) раскрывает еще одно опаснейшее и очень коварное свойство технических объектов, спроектированных по привычным методикам, без учета новых явлений, открытых в СПбГУ: при изготовлении любого технического устройства малые отклонения реальных параметров (а значит, и коэффициентов математической модели) от расчетных значений неизбежны, но знак этих отклонений не предсказуем. Вполне может оказаться, что реальная величина параметра будет меньше расчетной, т.е. окажется, что ? < 0. Тогда изготовленное устройство окажется устойчивым и нормально работающим. Оно будет иметь малый запас устойчивости — но на испытаниях реального устройства запас устойчивости проверить чаще всего невозможно (обычно рекомендуемое «покачивание параметров» редко помогает — о причинах этого подробно рассказано в [2]). Поэтому изготовленное устройство будет признано хорошим и может быть установлено, например, на самолете как одна из его многочисленных систем. Устройство будет исправно работать не предсказуемое заранее время — до тех пор, пока при неизбежном в ходе эксплуатации «дрейфе» параметров устройство потеряет устойчивость, «пойдет в разнос» и вызовет аварию, которая может перерасти в катастрофу, с гибелью пассажиров и экипажа.
Подобные аварии происходят не каждый день, а несколько реже только потому, что «особые» системы и устройства, для которых привычные методы расчета дают неверные данные о запасах устойчивости, встречаются не очень часто. Но мириться с авариями нельзя, а предотвращать их можно только проверкой технической документации самолетов на основе методов, разработанных в СПбГУ и «Военмехе».
Формулы (19) и (20) иллюстрируют основные черты аварий, произошедших именно по причине неполноты привычных методов расчета, о которых уже говорилось в параграфе 8: благодаря наличию быстро растущего члена (20) в переходном процессе, авария развивается очень быстро; если же она не привела к гибели самолета, то через некоторое время малый «дрейф» параметров может привести к тому, что малое ? > 0 превратится в малое ? < 0 и устройство снова будет работать нормально (хотя малый запас устойчивости сохранится). Мы убеждаемся, что это те самые особенности, которые проявились у аварий над Междуреченском и Бухарестом, о которых говорилось в параграфе 8.
Мы убеждаемся, что научное исследование разъясняет загадочные особенности аварий, ранее казавшиеся очень странными. Заметим, что при исключении части переменных (широко используемом при «аналитическом конструировании» регуляторов) выход системы на границу устойчивости происходит при любых значениях коэффициентов. Это объясняет, почему в 60-е годы аварии с «аналитически сконструированными» регуляторами происходили так часто. Затем структуру регуляторов изменили и аварии стали реже, но не прекратились совсем. Для полного прекращения опасных аварий, связанных с неполнотой привычных методов расчета, нужно использовать дополнительные проверки, описанные в книгах [1], [2], [7].
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
ЧАСТЬ IV
ЧАСТЬ IV
ЧАСТЬ V
ЧАСТЬ V
25.24. TOTO [ЦЕЦЕ — целое вместо целого], ТОра [ЦЕча — целое вместо части], раТО [чаЦЕ — часть вместо целого], рара [чача — часть вместо части]
25.24. TOTO [ЦЕЦЕ — целое вместо целого], ТОра [ЦЕча — целое вместо части], раТО [чаЦЕ — часть вместо целого], рара [чача — часть вместо части] Когда означающее нечто целое слово относится ко всему целому, то такое словоупотребление именуют «totum pro toto» (целое вместо целого).
Часть I
Часть I Детство Все началось с радиолы «Кама» – с прекрасными белыми клавишами, которые издавали восхитительный звук при переключении диапазонов. Мы жили небогато, и покупка была значительной. Но папа решился. Мы притащили «Каму» домой, включили, нашли «Голос Америки» и
2.3. «Первая часть» Домициана — это, в основном, Михаил Романов, а «первая часть» Сабина — это Иван Сусанин + Богдан Сабинин
2.3. «Первая часть» Домициана — это, в основном, Михаил Романов, а «первая часть» Сабина — это Иван Сусанин + Богдан Сабинин Как мы сейчас увидим, первая часть жизнеописания «античного» Домициана является отражением Михаила Романова, а «первая часть» Сабина — отражением
Калининская ложкарная часть и ложкарная часть на Загороднот проспекте
Калининская ложкарная часть и ложкарная часть на Загороднот проспекте Современный адрес — Лесной пр., 17.Еще одну пожарную часть построили в 1930 году по проекту архитекторов Г.А. Симонова, И.Г. Капцюга на Лесном проспекте.Здание представляет собой два прямоугольных объема
Общий список литературы к беседам (часть I + часть II):
Общий список литературы к беседам (часть I + часть II): 1. Рим: путеводитель/ 12 прогулок по городу. — Вокруг света, 2004. — 203с.2. Роттердамский Эразм. Разговоры запросто. — М.: ХЛ, 1969. — 704с.3. Крысин Л.П. Иллюстрированный толковый словарь иностранных слов. — М.: Эксмо. 2011. —
Часть I
Часть I Пролог Европейские народы древности Древняя европейская цивилизация показала удивительное миролюбие. Как указывает Мария Гимбутас, ни один из примерно 150 дошедших до нас рисунков из Чатал-Хююка[1] не запечатлел конфликты, сражения, войны или пытки,[2] Древняя